Video Analysis
https://docs.opencv.org/4.5.0/da/dd0/tutorial_table_of_content_video.html (opens in a new tab)
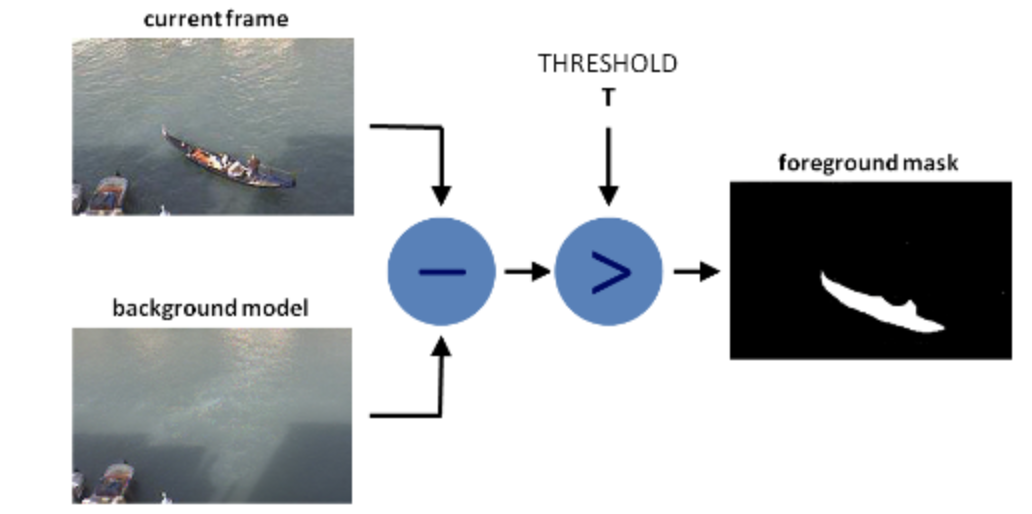
Background Substraction (BS)
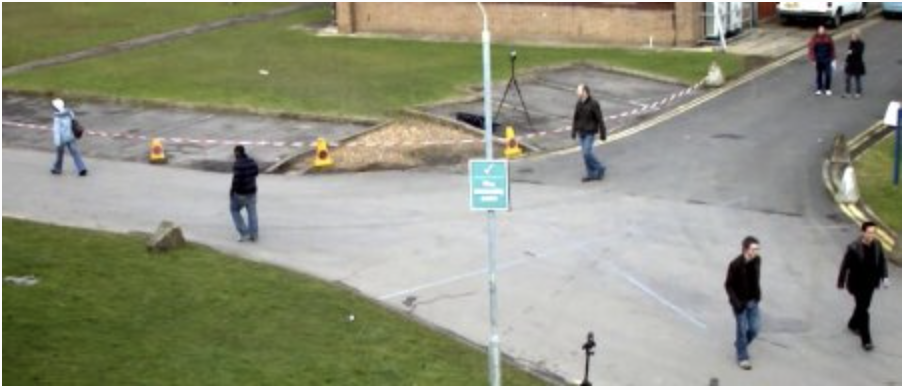
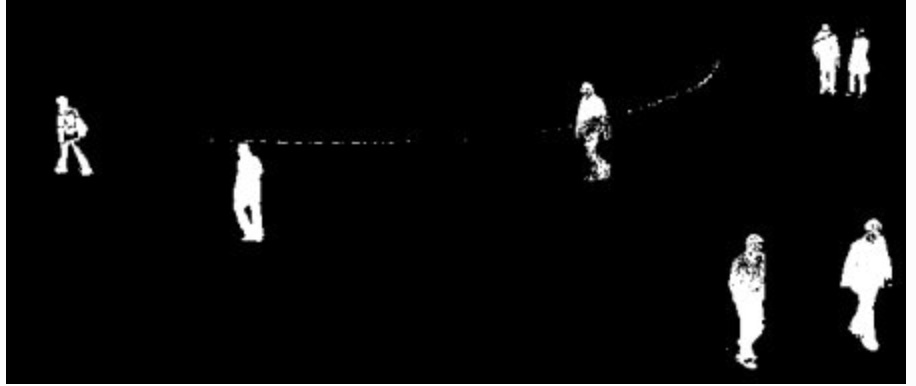
- Goal is generating a foreground mask (a binary image containing the pixels belonging to moving objects in the scene) by using static cameras.
- BS calculates the foreground mask performing a subtraction between the current frame and a background model, containing the static part of the scene
- Back ground modeling is made of 2 steps:
- Background initialization
- Back ground update, to adapt to possible changes
- But in most of the cases, you may not have a image without people or cars to init, so we need to extract the background from whatever images we have.
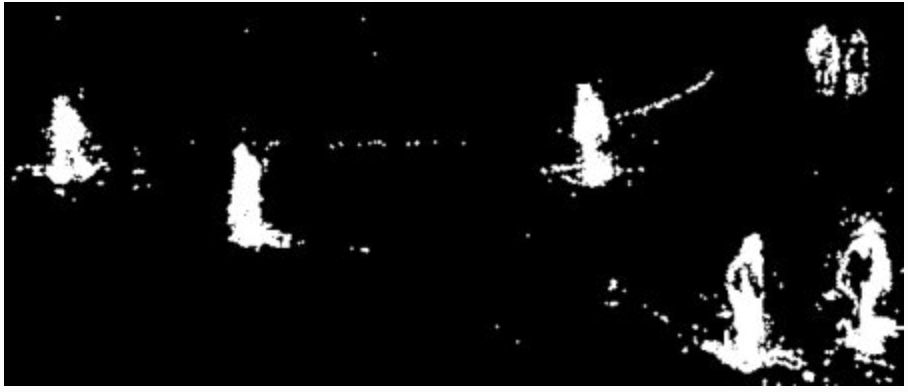
- It become more complicated when there is shadow of the vehicles. Since shadow is also moving, simple subtraction will mark that also as foreground. It complicates things.
-
BackGroundSubstractorMOG
-
Gaussian Mixture-based Background/Foreground Segmentation Algorithm.
-
Model each background pixel by a mixture of K Gaussian distributions (K = 3 to 5).
-
The weights of the mixture represent the time proportions that those colours stay in the scene.
-
The probable background colours are the ones which stay longer and more static.
-
-
BackGroundSubstractorMOG2

-
BackgroundSubtractorGMG
-
full script
from __future__ import print_function import cv2 as cv import argparse parser = argparse.ArgumentParser(description='This program shows how to use background subtraction methods provided by \ OpenCV. You can process both videos and images.') parser.add_argument('--input', type=str, help='Path to a video or a sequence of image.', default='vtest.avi') parser.add_argument('--algo', type=str, help='Background subtraction method (KNN, MOG2).', default='MOG2') args = parser.parse_args() if args.algo == 'MOG2': backSub = cv.createBackgroundSubtractorMOG2() else: backSub = cv.createBackgroundSubtractorKNN() #capture = cv.VideoCapture(cv.samples.findFileOrKeep(args.input)) capture = cv.VideoCapture(0) if not capture.isOpened: print('Unable to open: ' + args.input) exit(0) while True: ret, frame = capture.read() if frame is None: break fgMask = backSub.apply(frame) cv.rectangle(frame, (10, 2), (100,20), (255,255,255), -1) cv.putText(frame, str(capture.get(cv.CAP_PROP_POS_FRAMES)), (15, 15), cv.FONT_HERSHEY_SIMPLEX, 0.5 , (0,0,0)) cv.imshow('Frame', frame) cv.imshow('FG Mask', fgMask) keyboard = cv.waitKey(30) if keyboard == 'q' or keyboard == 27: break
Mean Shift and CamShift
-
Meanshift
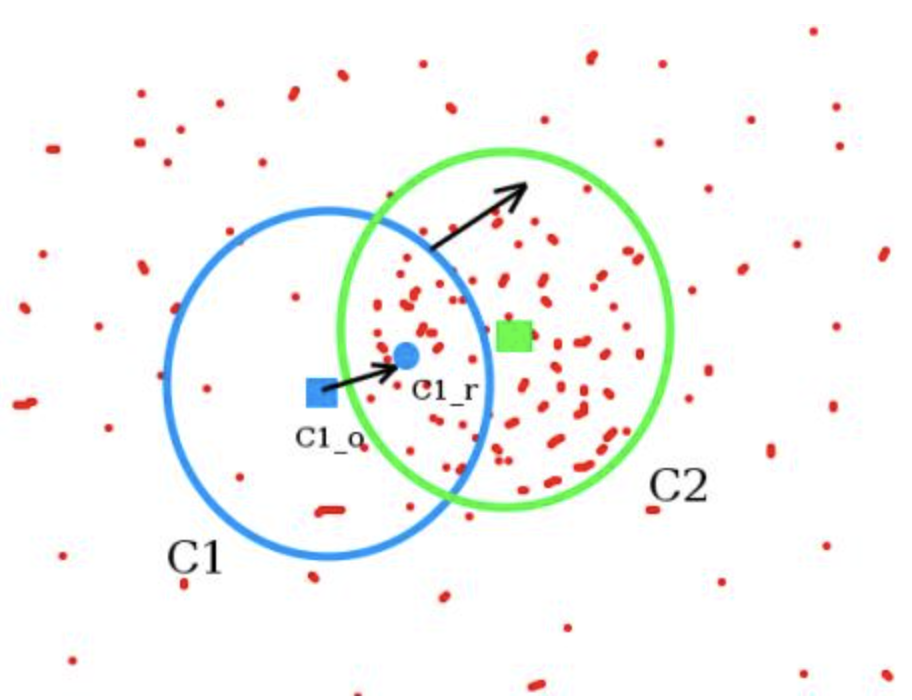
- Start by computing back projection using a ROI window
- Computing difference between circle windows center and points centroid, update the center with the centroid, until convergence
- So finally what you obtain is a window with maximum pixel distribution.
-
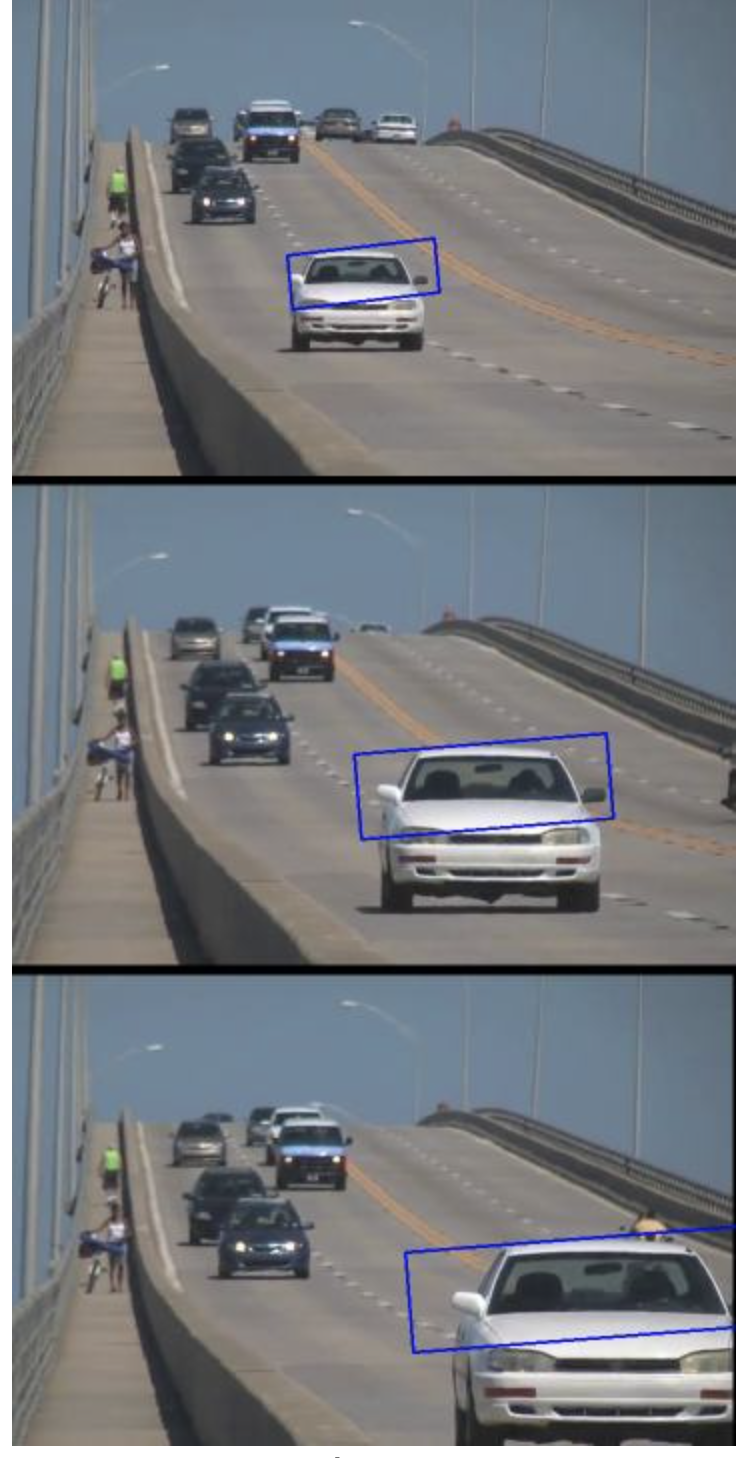
Continuously Adaptive Meanshift: Camshift
- The issue with meanshift is that our window has always the same size
- Applies meanshift first.
- Once meanshift converges, update the window size as
- Also compute the orientation of the best fitting ellipse
-
Implementation
import numpy as np import cv2 cap = cv2.VideoCapture('slow.flv') # take first frame of the video ret,frame = cap.read() # setup initial location of window r,h,c,w = 250,90,400,125 # simply hardcoded the values track_window = (c,r,w,h) # set up the ROI for tracking roi = frame[r:r+h, c:c+w] hsv_roi = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV) mask = cv2.inRange(hsv_roi, np.array((0., 60.,32.)), np.array((180.,255.,255.))) roi_hist = cv2.calcHist([hsv_roi],[0],mask,[180],[0,180]) cv2.normalize(roi_hist,roi_hist,0,255,cv2.NORM_MINMAX) # Setup the termination criteria, either 10 iteration or move by atleast 1 pt term_crit = ( cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10, 1 ) while(1): ret ,frame = cap.read() if ret == True: hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV) dst = cv2.calcBackProject([hsv],[0],roi_hist,[0,180],1) # apply meanshift to get the new location ret, track_window = cv2.CamShift(dst, track_window, term_crit) # Draw it on image pts = cv2.boxPoints(ret) pts = np.int0(pts) img2 = cv2.polylines(frame,[pts],True, 255,2) cv2.imshow('img2',img2) k = cv2.waitKey(60) & 0xff if k == 27: break else: cv2.imwrite(chr(k)+".jpg",img2) else: break cv2.destroyAllWindows() cap.release() -
hardcode initial track_window
-
inRange on initial ROI to filter low saturation and low visibility
-
track_window computed iteratively and passed as a argument
Optical Flow
https://docs.opencv.org/4.5.0/d4/dee/tutorial_optical_flow.html (opens in a new tab)
https://learnopencv.com/optical-flow-in-opencv/ (opens in a new tab)
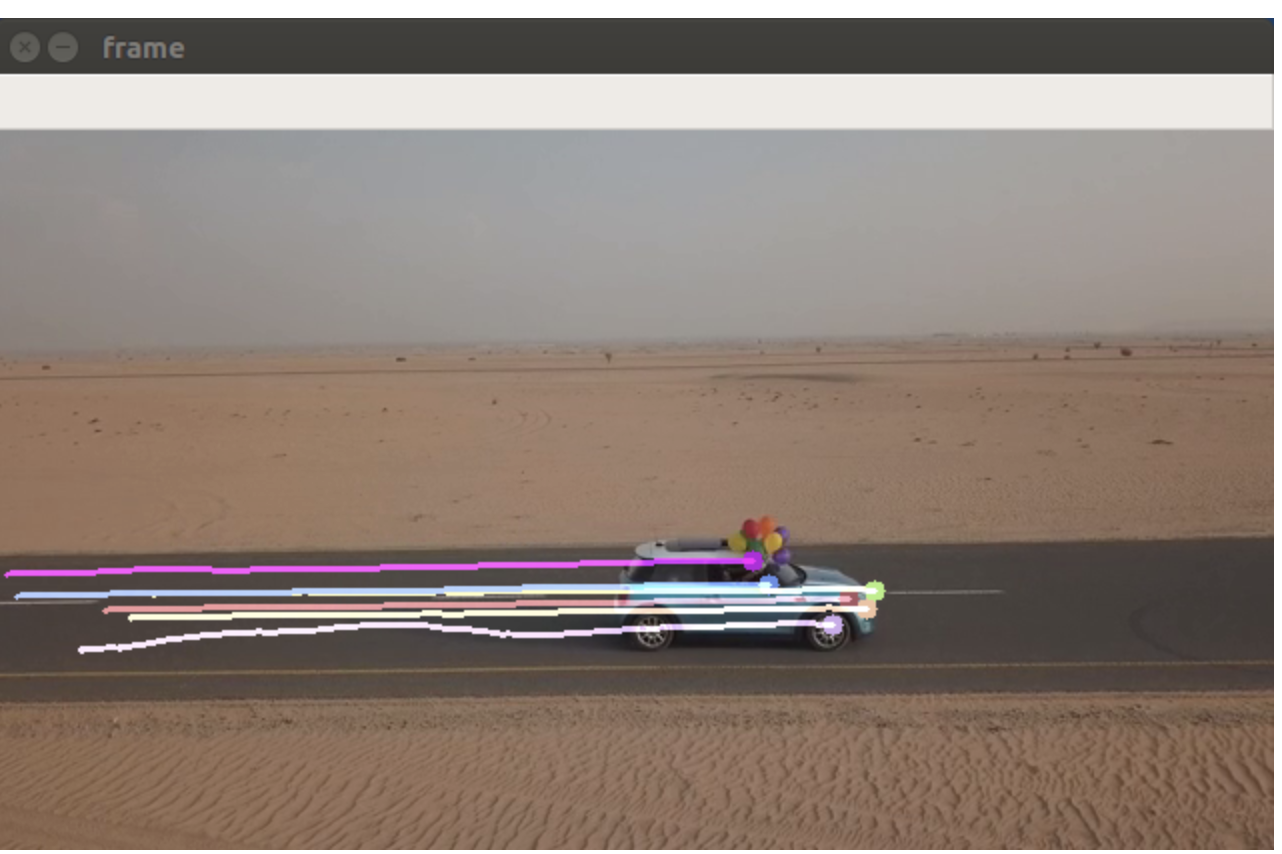
Sparse
-
Hypothesis
- The pixel intensities of an object do not change between consecutive frames.
- Neighbouring pixels have similar motion.
-
Optical flow equation
using Taylor
,
with , , ,
are unknown. We solve it using Lucas-Kanade
-
Kanade:
-
Takes a 3x3 patch around the point. So all the 9 points have the same motion
-
We can find for these 9 points, ie solving 9 equations with two unknown variables, which is over-determined
-
ie
Least squares
thus
-
-
Fails when there is a large motion
-
To deal with this we use pyramids: multi-scaling trick.
- When we go up in the pyramid, small motions are removed and large motions become small motions.
-
We find corners in the image using Shi-Tomasi corner detector (opens in a new tab) and then calculate the corners’ motion vector between two consecutive frames.
-
full script
# params for ShiTomasi corner detection feature_params = dict( maxCorners = 100, qualityLevel = 0.3, minDistance = 7, blockSize = 7 ) # Parameters for lucas kanade optical flow lk_params = dict( winSize = (15,15), maxLevel = 2, criteria = (cv.TERM_CRITERIA_EPS | cv.TERM_CRITERIA_COUNT, 10, 0.03)) # Create some random colors color = np.random.randint(0,255,(100,3)) # Take first frame and find corners in it ret, old_frame = cap.read() old_gray = cv.cvtColor(old_frame, cv.COLOR_BGR2GRAY) p0 = cv.goodFeaturesToTrack(old_gray, mask = None, **feature_params) # Create a mask image for drawing purposes mask = np.zeros_like(old_frame) while(1): ret,frame = cap.read() frame_gray = cv.cvtColor(frame, cv.COLOR_BGR2GRAY) # calculate optical flow p1, st, err = cv.calcOpticalFlowPyrLK(old_gray, frame_gray, p0, None, **lk_params) # Select good points good_new = p1[st==1] good_old = p0[st==1] # draw the tracks for i,(new,old) in enumerate(zip(good_new, good_old)): a,b = new.ravel() c,d = old.ravel() mask = cv.line(mask, (a,b),(c,d), color[i].tolist(), 2) frame = cv.circle(frame,(a,b),5,color[i].tolist(),-1) img = cv.add(frame ,mask) cv.imshow('frame', img) k = cv.waitKey(30) & 0xff if k == 27: break # Now update the previous frame and previous points old_gray = frame_gray.copy() p0 = good_new.reshape(-1,1,2)
Dense
Compute motion for every pixel in the image
def dense_optical_flow(method, video_path, params=[], to_gray=False):
# Read the video and first frame
cap = cv2.VideoCapture(video_path)
ret, old_frame = cap.read()
# crate HSV & make Value a constant
hsv = np.zeros_like(old_frame)
hsv[..., 1] = 255
# Preprocessing for exact method
if to_gray:
old_frame = cv2.cvtColor(old_frame, cv2.COLOR_BGR2GRAY)
while True:
# Read the next frame
ret, new_frame = cap.read()
frame_copy = new_frame
if not ret:
break
# Preprocessing for exact method
if to_gray:
new_frame = cv2.cvtColor(new_frame, cv2.COLOR_BGR2GRAY)
# Calculate Optical Flow
flow = method(old_frame, new_frame, None, *params)
# Encoding: convert the algorithm's output into Polar coordinates
mag, ang = cv2.cartToPolar(flow[..., 0], flow[..., 1])
# Use Hue and Value to encode the Optical Flow
hsv[..., 0] = ang * 180 / np.pi / 2
hsv[..., 2] = cv2.normalize(mag, None, 0, 255, cv2.NORM_MINMAX)
# Convert HSV image into BGR for demo
bgr = cv2.cvtColor(hsv, cv2.COLOR_HSV2BGR)
cv2.imshow("frame", frame_copy)
cv2.imshow("optical flow", bgr)
k = cv2.waitKey(25) & 0xFF
if k == 27:
break
# Update the previous frame
old_frame = new_frame-
Dense Pyramid Lucas-Kanade algorithm
elif args.algorithm == 'lucaskanade_dense': method = cv2.optflow.calcOpticalFlowSparseToDense frames = dense_optical_flow(method, video_path, save, to_gray=True)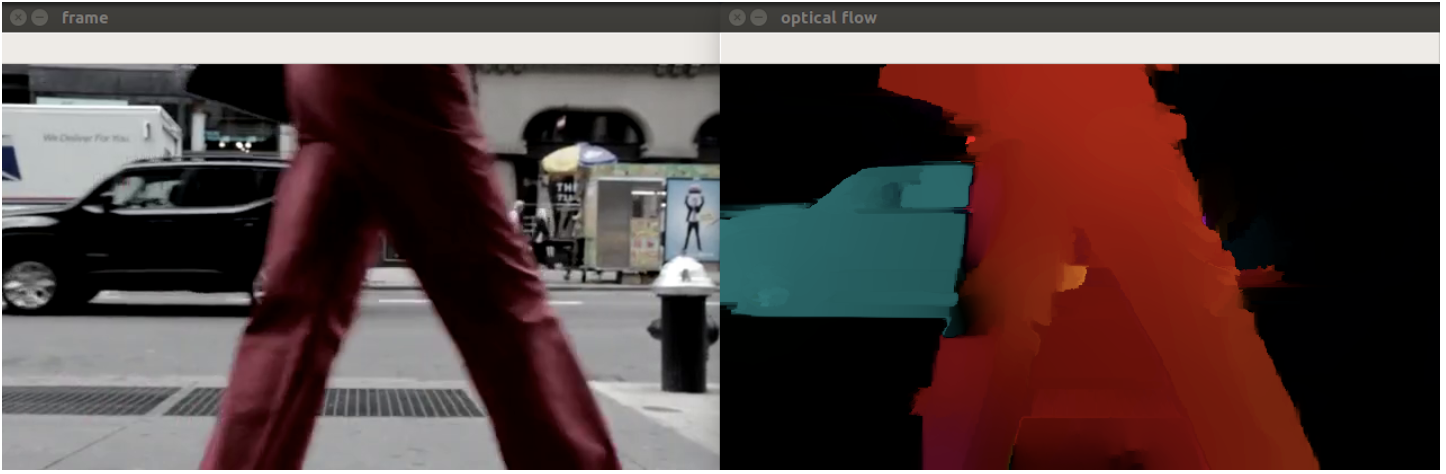
-
Farneback algorithm
-
Approximate some neighbors of each pixel with a polynomial, taking the second order of Taylor expansion
-
We observe the differences in the approximated polynomials caused by object displacements
elif args.algorithm == 'farneback': method = cv2.calcOpticalFlowFarneback params = [0.5, 3, 15, 3, 5, 1.2, 0] # default Farneback's algorithm parameters frames = dense_optical_flow(method, video_path, save, params, to_gray=True)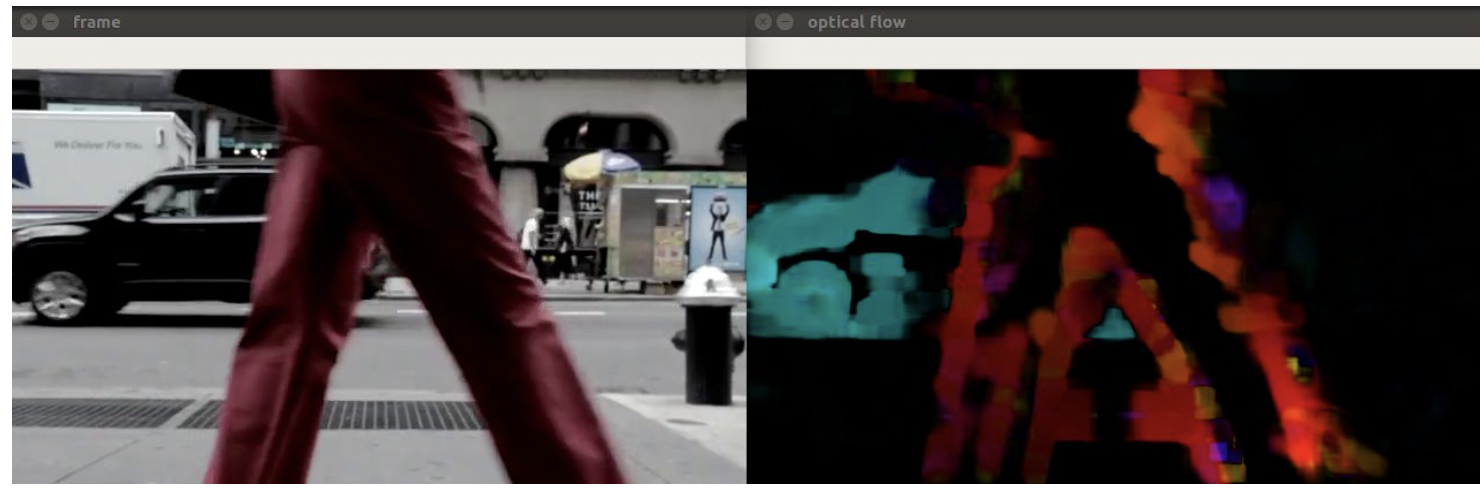
-
-
RLOF
-
The intensity constancy assumption doesn’t fully reflect how the real world behaves.
-
There are also shadows, reflections, weather conditions, moving light sources, and, in short, varying illuminations.
with illumination parameters
elif args.algorithm == "rlof": method = cv2.optflow.calcOpticalFlowDenseRLOF frames = dense_optical_flow(method, video_path, save)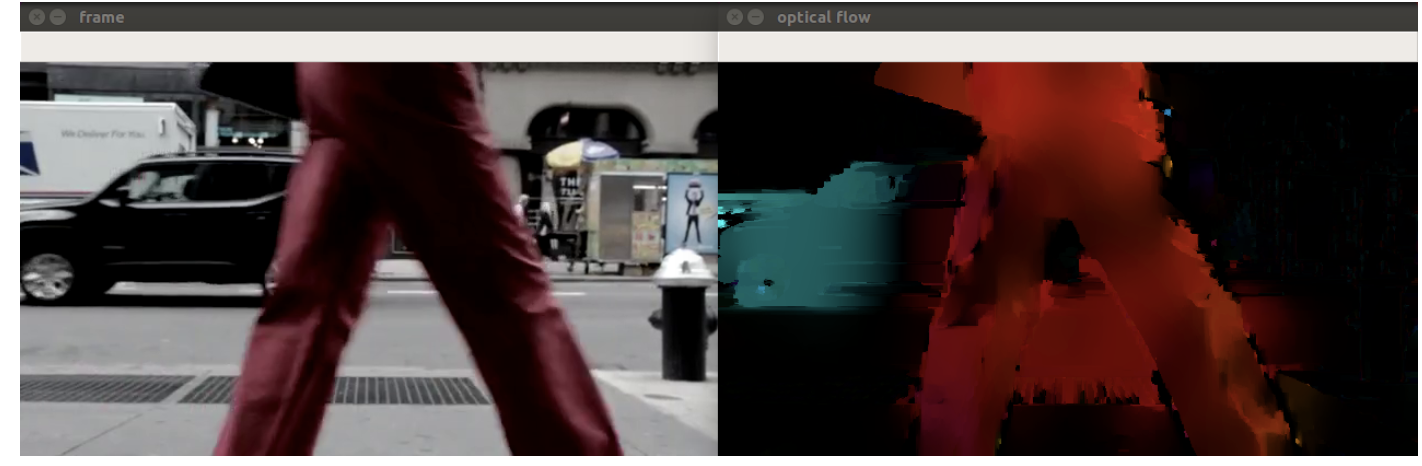
-